Topology Optimized Drone Frame
A lightweight, high-strength drone frame engineered through topology optimization to maximize stiffness while minimizing material use.
This project explored the design of a lightweight quadcopter frame through topology optimization, with the objective of extending flight endurance by reducing structural weight. Using Siemens NX’s topology optimization environment, loads were applied at the motor locations and small fixed constraints were introduced to approximate an ideal hovering condition. The optimization process achieved a weight reduction of roughly 50% while maintaining high stiffness throughout the structure, demonstrating the potential of advanced computational design for UAV applications.
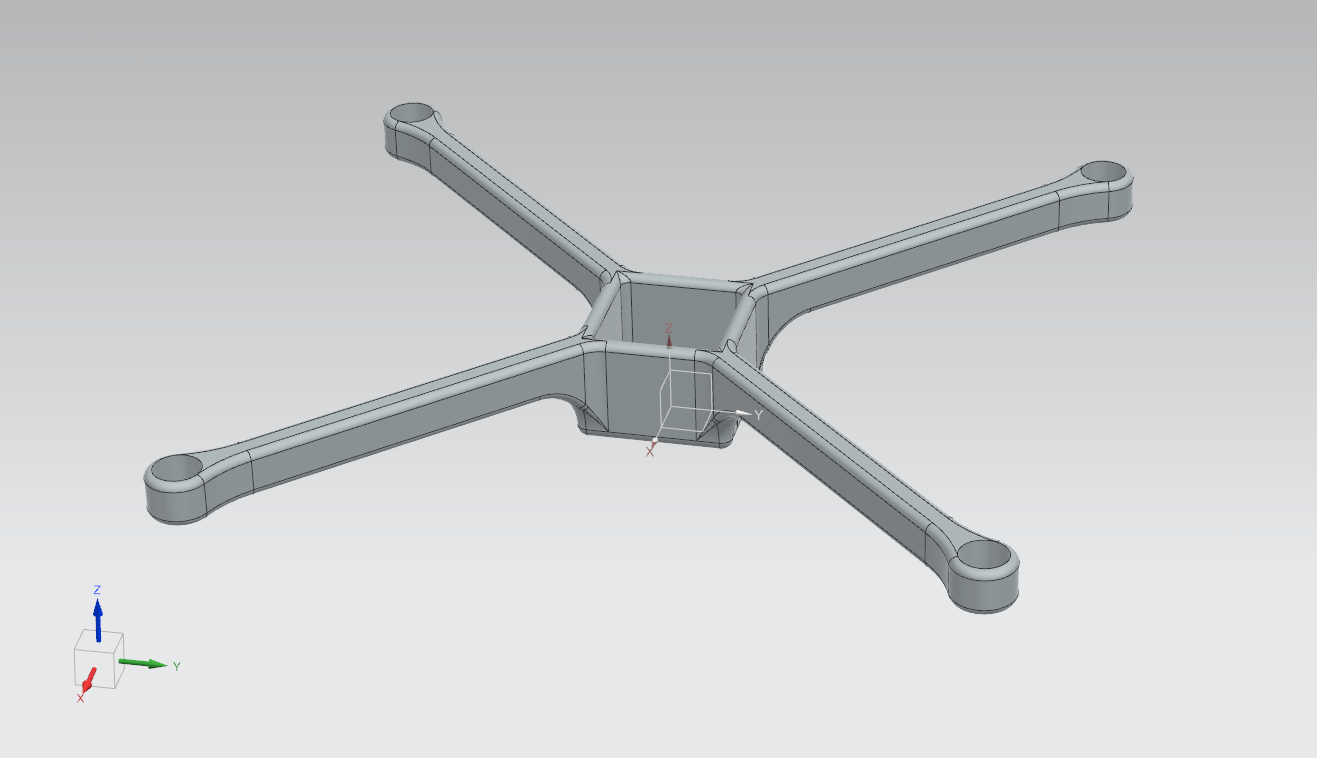
Fig. 1 Shows the design space for the drone frame
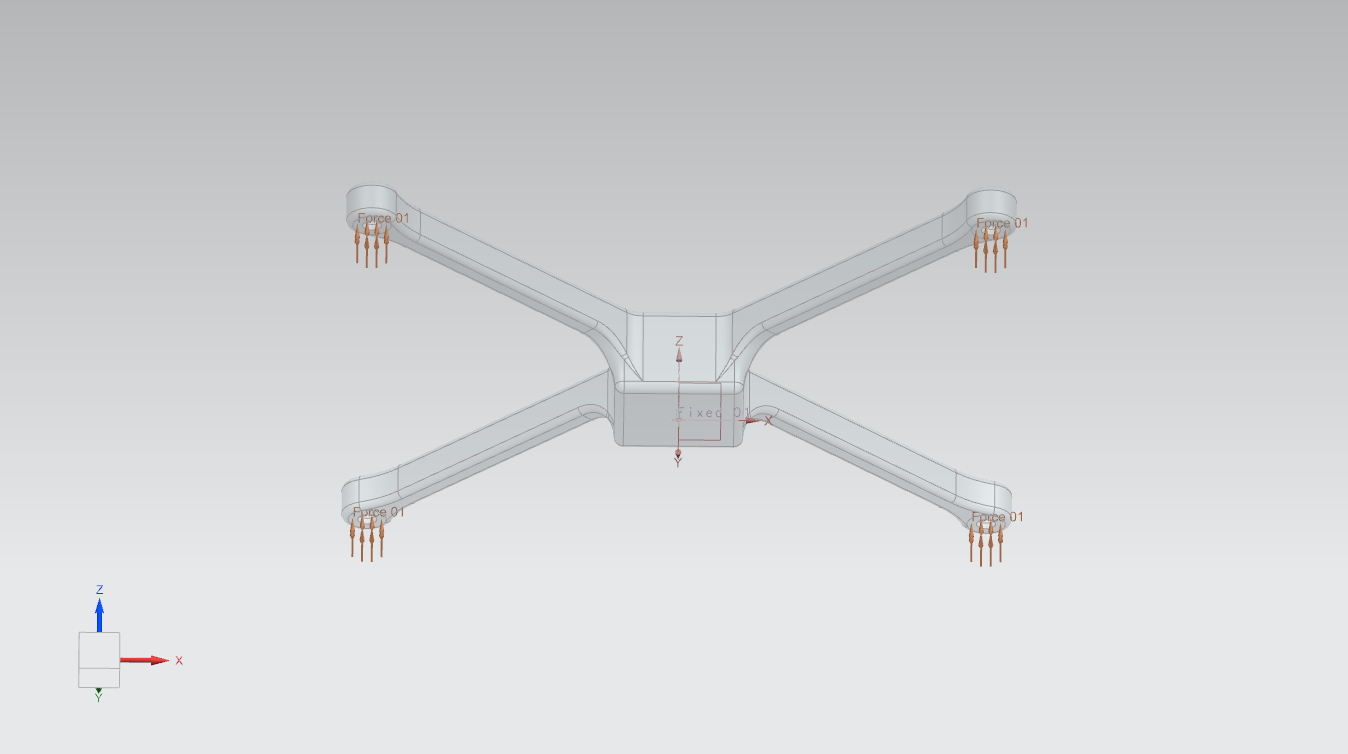
Fig. 2 shows Loads and Constraintes applied to simulate “Perfect Hovering”
The optimization process delivered a highly efficient drone frame design, cutting overall weight by nearly 50% while preserving the stiffness required for stable flight. The resulting structure showcased the power of computational design to uncover material-efficient geometries that would be difficult to achieve through conventional methods. By reducing mass so significantly, the optimized frame directly supports extended battery life and longer flight times, addressing one of the most critical limitations in drone performance. Beyond the numerical improvements, the outcome highlights how topology optimization can unlock lightweight, structurally robust solutions that push the boundaries of UAV design.

Fig. 3 Shows the Raw optimized design in a Facet body type
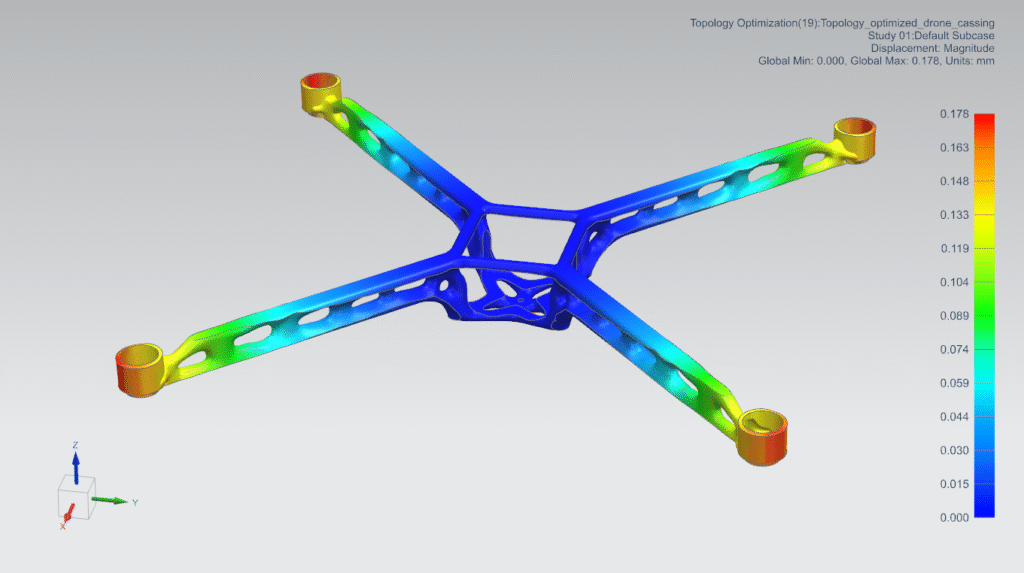
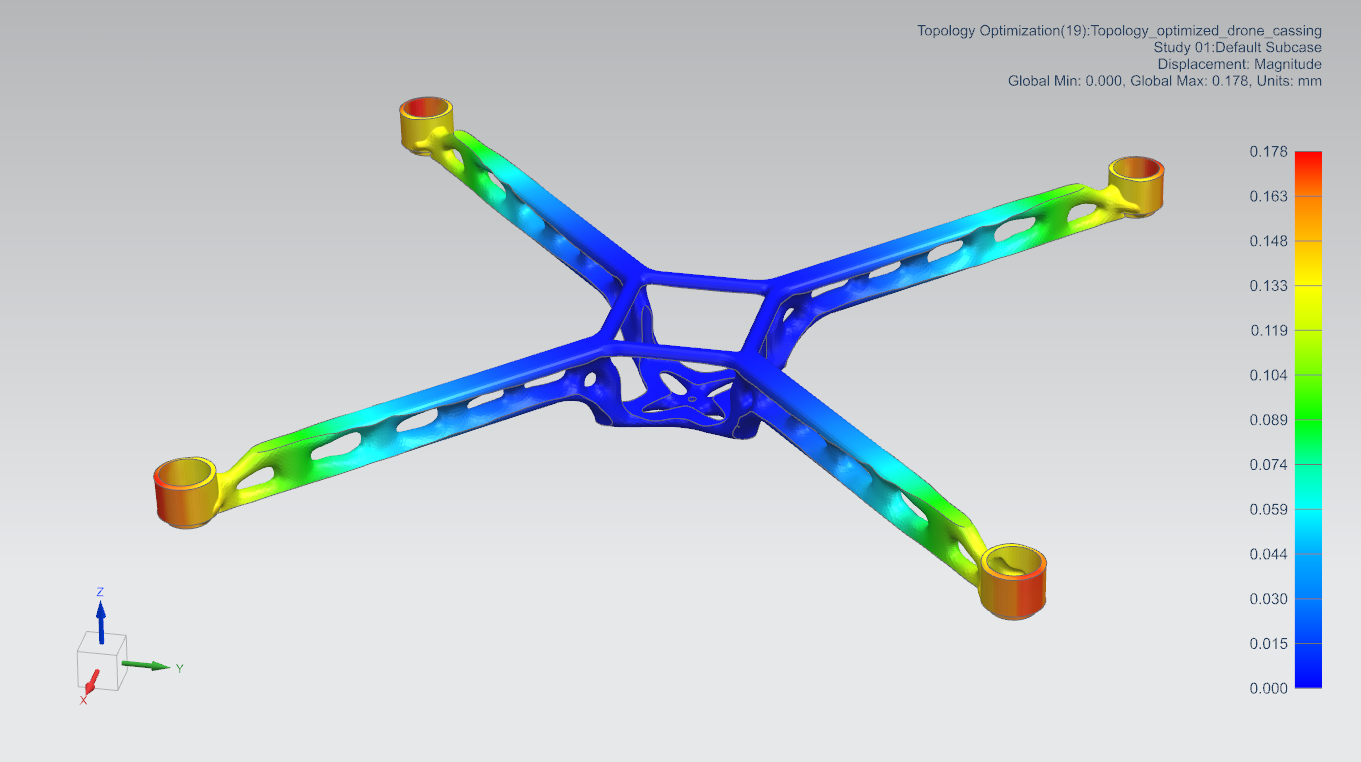
Fig. 4 Shows displacement (mm) simulation done on the optimized body
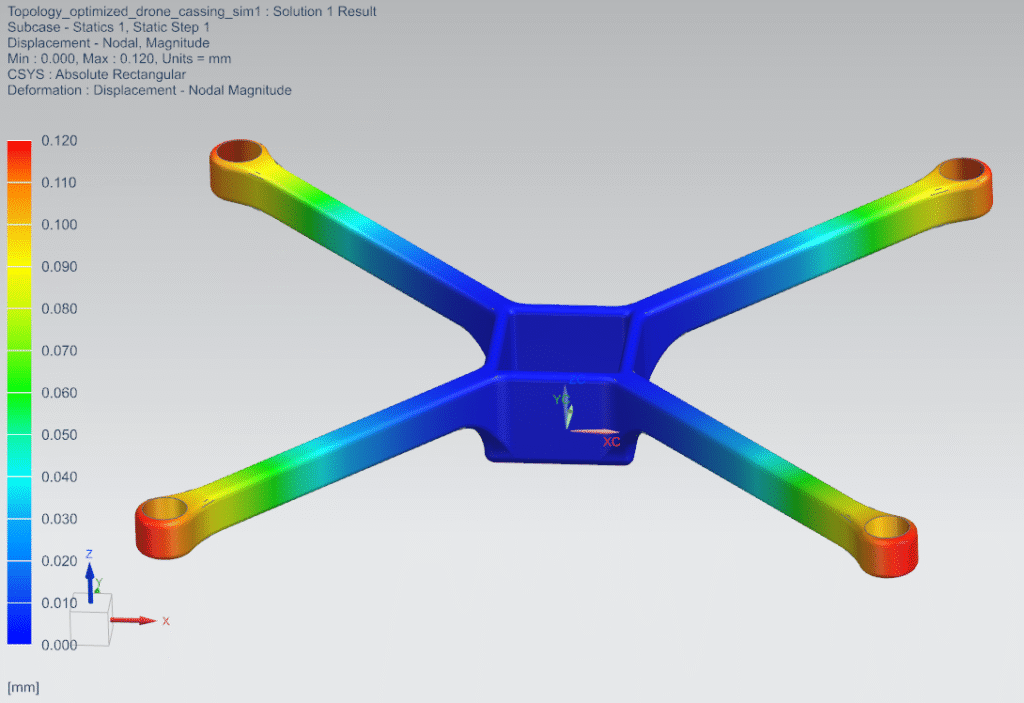
Fig. 5 Shows Displacement (mm) of original Design space with the same loads and constraints.
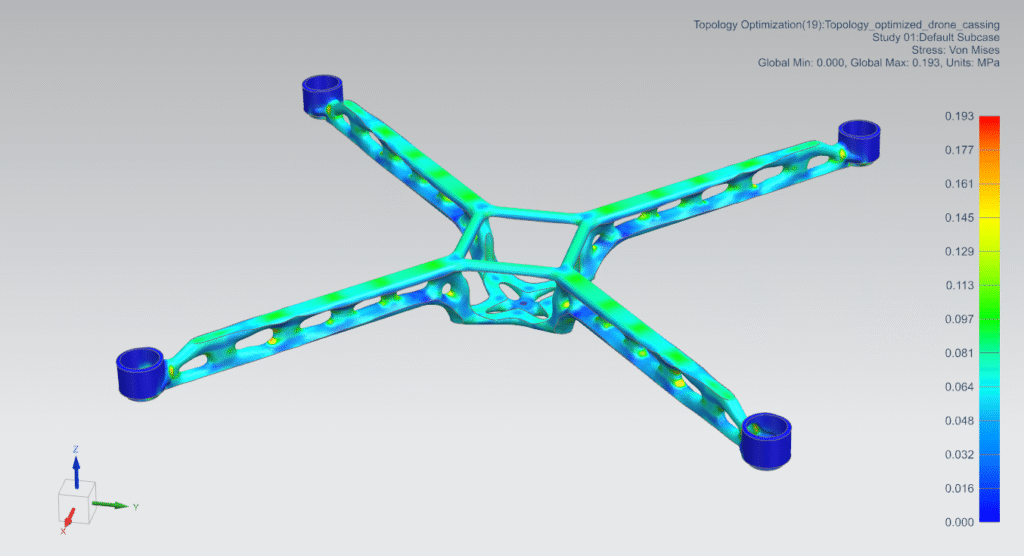
Fig 6 Displays stresses (MPa) on the optimized body
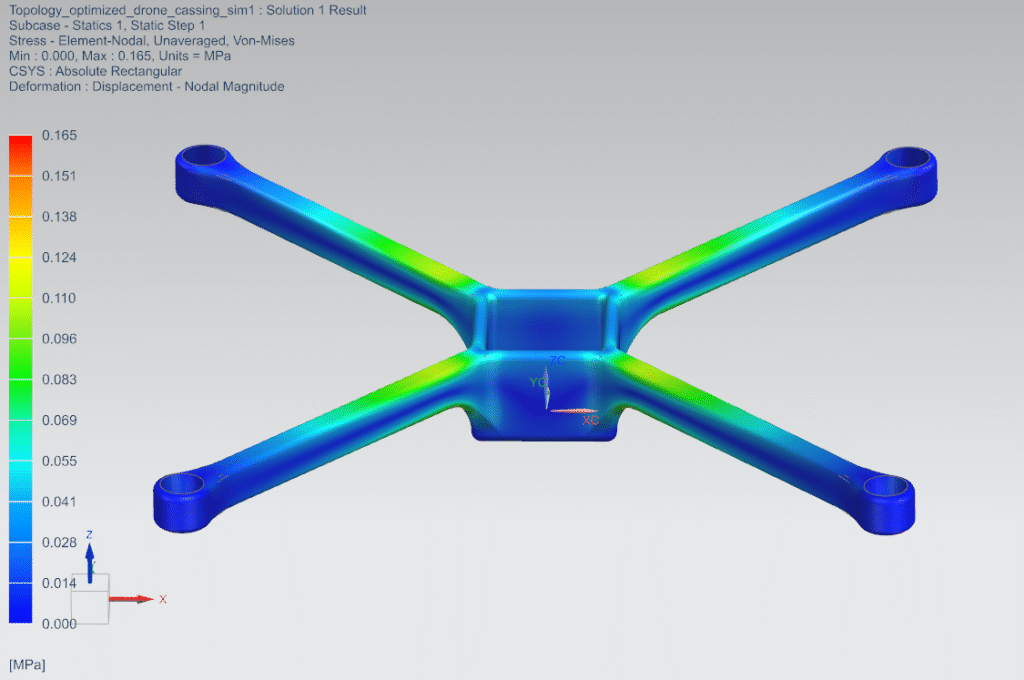
Fig. 7 Display stresses (MPa) on original design space.
The simulation results highlight that the optimized body achieved substantial weight reduction while maintaining structural performance within acceptable limits. As shown in Figure 4, the optimized frame exhibited a maximum displacement of 0.178 mm, compared to 0.12 mm for the original design space illustrated in Figure 5. Similarly, the stress distribution, presented in Figure 6, reached a maximum of 0.193 MPa, only slightly higher than the 0.165 MPa observed in the original design space shown in Figure 7. These results demonstrate that, despite modest increases in displacement and stress, the optimized design delivers significant mass savings while preserving the stiffness and load-bearing capacity required for drone operation.
To prepare the optimized frame for fabrication, the facet body generated from the topology optimization was first converted into a convergent body and then exported as a high-quality STL file by reducing both the chordal and angular tolerances. This ensured that the complex geometry was accurately captured for printing. The STL was then transferred into slicer software, where printer settings and part orientation were defined. Figure 8 shows the sliced view of the optimized frame, where all regions except the light blue are structural material, and the light blue indicates support structures required for overhangs. The total print weight, including supports, was calculated at 359 g. A 20% infill density was selected using a gyroid pattern, chosen for its isotropic mechanical behavior, which provides consistent stiffness in all directions while further reducing unnecessary mass.
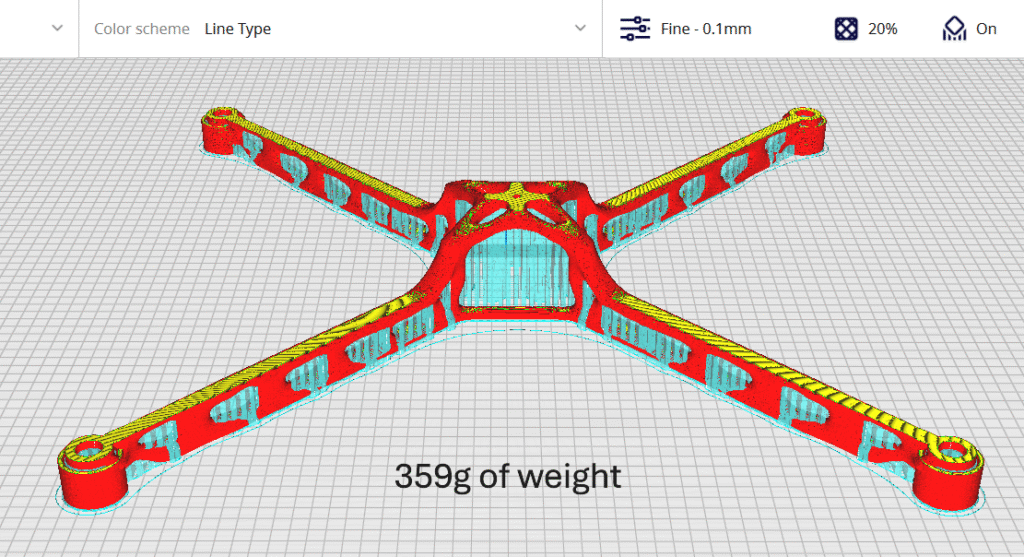
Fig. 8 Sliced optimized Drone frame
The topology optimization of the quadcopter frame successfully demonstrated how advanced computational design can deliver substantial performance improvements for UAV structures. By applying load cases representative of hovering conditions, the optimized design achieved a 50% reduction in weight while maintaining acceptable displacement and stress levels. Although the process introduced manufacturing challenges such as support-heavy regions and material limitations inherent to PLA and ABS, the study validated the feasibility of producing complex, efficient geometries with accessible 3D printing methods. The sliced model, weighing 359 g including supports, further highlights the practicality of integrating gyroid infill structures for weight reduction and isotropic stiffness. Overall, the project shows how topology optimization, when combined with additive manufacturing, can extend flight endurance and open new possibilities for lightweight drone design, while also pointing to areas of improvement in manufacturability, integration, and material selection for future iterations.